- 発行日 2024年5月30日
- 最終変更日 2024年5月30日
- 5 分
ロボット部品ガイド

このガイドでは、市販されている最も身近で人気のあるロボット部品やコンポーネントの種類を紹介するとともに、基本的なロボットの種類と、それらが現代の産業界で果たす役割について説明します。
ロボット部品とは?

産業用ロボットが年々複雑化し、機能的に進化するにつれ、その能力と役割の幅は飛躍的に拡大してきました。
同時に、過去10年の間に技術が進歩し続けたにもかかわらず、ロボットの設計と構造における多くの主要部品(特にセンサー)の製造コストは劇的に低下しました。その結果、非常に幅広い産業でロボットやロボット部品の入手可能性が急速に拡大し、手頃な価格で入手できるようになりました。
ロボットや、従来は手作業であった生産工程のロボット化要素は、非常に高い生産量と売上高のあるビジネスでのみ使用可能なほど高価ではなくなったため、小規模なオペレーションでも以前より一般的になっています。
非常に複雑な機械であれ、比較的シンプルな機械であれ、すべてのロボットは基本的に共通するいくつかの主要な部品で構成されています。プログラム可能な産業用ロボットには、常に以下の要素があります:
- 機械の「頭脳」として機能するコントローラー
- プログラムされた動作を実行するための一連の機械部品やアタッチメント
- 外部からの刺激に応じてロボットの性能を微調整するためのセンサー
上記で言及されている「外部からの刺激に応じること」は、ロボット工学やロボット部品を他のハイテクコンポーネントと区別する重要な要素です。反復的な作業を一定の基準で実行できる単なる機械とは異なり、何をロボットと呼ぶかについては、まだ標準化された合意はありません。
私たちが「ロボット工学」と考えているものを特定する上で重要な要素は、機械が自律的にその環境の特定の側面を認識し、反応する能力です。例えば、私たちからの(最初の指示以上の)最小限のインプットで、一定の基準で反復可能なタスクを実行するケトルであっても、通常はロボットとは考えないことはお分かりいただけるでしょう。
現在、多くの種類の「スマート」テクノロジーは、身近な環境の変化するパラメータをモニターし、それに反応する能力のおかげで、単純な機械とロボット工学の境界線を曖昧にしています。これもまた、センサー技術が10年前よりもはるかに普及し、手頃な価格で製造できるようになったことが一因です。
ロボットの基本部品
上記のセクションで述べたように、ロボットの核心部分は、搭載される機械の複雑さに関係なく、モデルごとにほぼ一貫しています。基本的には、以下の要素が常に存在します:
- ロボットに指示を送るコントローラー(通常はコンピュータとソフトウェアパッケージ)
- 指定されたタスクを実行するための物理的構造と機械部品(モーター、ピストン、ホイール、ハウジング、さまざまなツールや「エンドエフェクタ」部品)
- 方向、温度、圧力、サイズなどの環境要因を理解し、反応するためのさまざまなセンサー、計測装置、応答調整可能なゲージ
以上は広範なカテゴリリストです。以下のセクションでは、あらゆる種類の産業や研究室の設定で使用される機械に見られる、頻繁に使用されるロボット部品について、もう少し具体的に見ていきます。
ロボットアーム

ロボットアームは、特定のタスクや作業を迅速かつ効率的に、そして非常に正確に実行するようにプログラムされた部品です。一般的にモーターで駆動され、特に重いものや繊細なもの、非常に反復的な作業を長期間にわたって一貫して迅速に行うために使用されます。これらは特に産業生産、製造、機械加工、組立分野で高く評価され使われています。
産業生産、組立、ピックアンドプレース用途で使用されるほとんどのロボットアームは、4〜6個の関節を持ち、人間の腕と手の基本機能を模倣するように設計されています。一般的な産業用プログラム可能ロボットアームの種類には、直交座標型、極座標型、円筒座標型、そしてスカラ型アームがあり、それぞれが主なタスクを実行するために、異なる形状と調整された「エンベロープ」内で動作します。
このテーマについてさらに詳しく知りたい場合は、ロボットアームガイドをご覧ください。
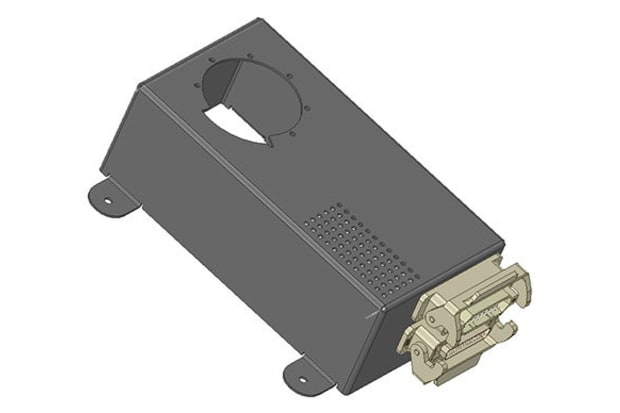
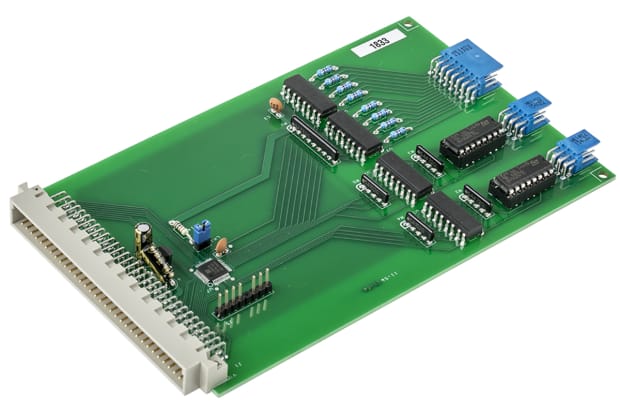
ロボットコントローラーと制御システム

ロボットコントローラーは多くの形態を取ることができますが、現代の職場で使用される場合、ほとんど常にハードウェアとソフトウェアの組み合わせが含まれ、これによってロボットに指示を出し、監視するデジタルコンピュータシステムが形成されます。
前述のように、コントローラの人間に最も近い役割は「脳」です。コントローラーによって生成され、送信される信号が、関節、マニピュレーター、およびエンドエフェクタのアタッチメントを含むすべてのロボット部品の動きを直接管理します。
ロボットコントローラーこそが、機械をロボットにする要素であり、特に外部の出来事や条件に自動的に適応できるセンサーと組み合わせて動作する場合にはそのことが顕著です。
ロボット制御システムは、大きく2つのカテゴリに分類されます。
- プリプログラム制御システム
- より単純なプリプログラム化されたロボットは、基本的な操作を何度も繰り返すように設計されており、外部環境の変化に対して非常に限定された方法で応答できます(全く応答できないものもあります)。そのため常に適切な条件の維持を必要とします。条件が維持されれば、目的のタスクを適切に実行できます。
- 自律型ロボット制御システム
- より複雑な自律型ロボットは、外部要因や環境の変化を検出してそれに応答するためのさまざまなセンサーや機構が搭載されています。
ロボットグリッパー

ロボット用グリッパーは、ロボットやロボットアームのエンドエフェクタ(「手」部分)に取り付けられるマニピュレーターの一つです。これにより、特定の機能や能力を提供します。ロボットグリッパーは、機械が幅広い物体や部品を確実に把持する手段を提供し、生産ライン、組立、ピックアンドプレースアプリケーションにおいて不可欠です。
通常、グリッパーは電動式、空気圧式、真空原理に基づいて設計されています。ほとんどのロボット部品と同様に、特定用途における最適なソリューションは、タスクの性質とロボットが作業する環境の条件によって決まります。
ロボットジョイントとモーター
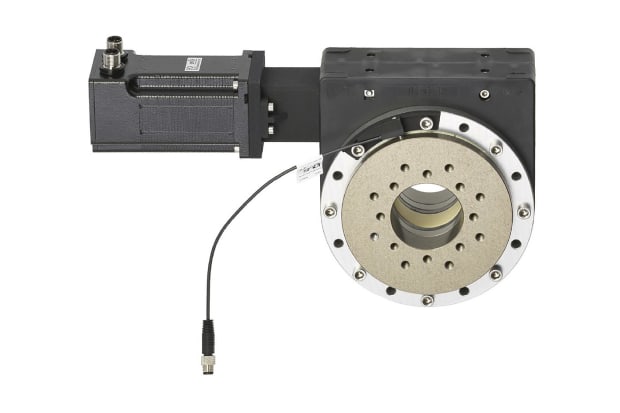
ロボットのジョイントとモーターは、機械に、何度も非常に精密で正確な動きを再現する能力を与えています。アクチュエーターとしても知られるモーターは、ロボットのサプライヤーから購入でき、適切なタイプを選択するには、ロボットに実行させたい動作の種類と範囲を考慮する必要があります。
ロボットに使われているモーターには次の種類があります:
- ACまたはDCモーター
- 非常に高いトルクに適しています( ACモーター )、または高速( DCモーター )なアプリケーションに有用ですが、特にDCモーターは追加のギアを付けない限り、通常はあまり強力ではありません
- 歯車付きACモーター や 歯車付きDCモーター も広く利用可能です
- サーボモーター
- AC、DC、またはブラシレスDCモーターと位置センシングデバイス、および制御回路を組み合わせたものです。サーボモーターは、角度位置を精密に制御する回転アクチュエーターです。モーターはギアで制御ホイールに取り付けられ、モーターが回転すると、位置センサーの抵抗が変化し、制御回路が移動を正確に調整できます。
- よく サーボドライブコントロール と組み合わせられます。これは、サーボメカニズムからの電力を増幅し、フィードバックをモニターするための電子増幅器の一種です。
- ステッパーモーター
- フルローテーションを複数の等しいステップに分割するブラシレスDC電動機です。モーターの位置は、フィードバック用の 位置センサー なしで、これらのステップの1つで移動して保持できます。
- コンピューター制御のステッピングにより、これらのモーターを非常に正確な位置決めや速度制御に使用でき、多くのロボット工学のアプリケーションに理想的です。
- リニアアクチュエーター
- リニアアクチュエーターは、直線運動を作成し、幅広い稼働条件に耐えるように設計されています。アクチュエーターは、電動機が発生させたエネルギーをトルクに変換し、それによってメカニズムを移動させます。
- アクチュエーターの制御システムは、機械的、電気的、またはソフトウェアで処理できます。
ロボットセンサーとトランスデューサー

人間の能力と比較すると、ロボットにはかなり簡単に、視覚、聴覚、触覚など基本的な感覚にアクセスするためのさまざまなセンサー、レンズ、その他のアドオンを取り付けることができます。問題は、ロボットにデータを受信するときにそれを理解し、意味付けする方法を教えることです。
入手可能な多様なロボット用センサーは、主要なカテゴリに分類できます。これには次のようなものが含まれます:
- 接触センサー
- 押しボタンと接触スイッチ
- 圧力パッドとセンサー
- 距離センサーと計器
- 超音波距離センサー
- 赤外線センサー
- レーザー測定装置とセンサー
- ストレッチおよび曲げセンサー
- 位置センサー
- 室内ロケーションセンサー
- GPSおよびその他のライブトラッキングデバイス
- 回転センサー
- ポテンショメータ
- ジャイロスコープデバイス
- 環境センサー
- フォト電気センサーまたは光センサー
- 音センサー
- 熱センサーと 熱画像カメラ
- 湿度および湿潤度センサー
- 圧力センサー
- ガスセンサー
様々なロボット
現代の産業や職場で使用されているさまざまな種類のロボットがあります。このセクションでは、よく見られるタイプと、それらが傾向として果たす役割について見ていきます。
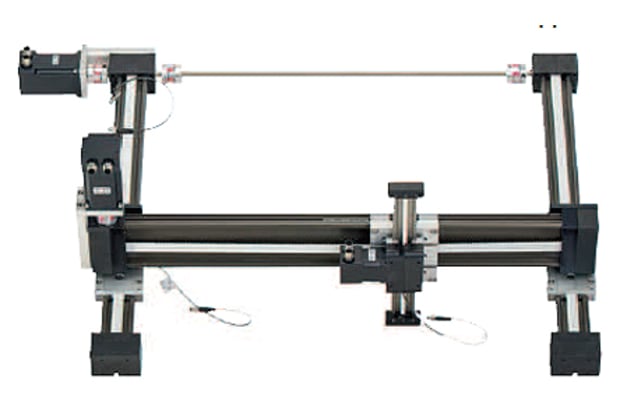
直交ロボット
直交ロボットは、直交座標系に基づいて動作するため、このように呼ばれます。言い換えれば、その動きは、グラフや3Dチャートで見慣れたX、Y、Z軸に沿ってプロットされ、制御されます。
そのため、直交ロボットやガントリーロボットの関節とモーターは、X、Y、Z座標を使用してプログラムされ、これらの3次元での直線的な動きを可能にします。一連のリニアアクチュエータにより、直交ロボットはツールやアタッチメントを3次元空間に正確に位置決めし、一連の直線運動で位置を切り替えて操作することができます。
円筒座標型ロボット
円筒座標型ロボットは、円筒形の「ワークエンベロープ」(ロボットが操作可能な物理的空間のサイズと形状を表すロボット設計用語)内でタスクを実行できるように、一連の軸に沿ってプログラムされます。円筒座標型ロボットの場合、このワークエンベロープは円筒形をしており、ロボットは上下および中心軸を中心とした動きを行うことができます。
これは、回転ジョイントと直線ジョイントの両方を組み込むことによって実現され、円筒座標型ロボットは回転運動と直線運動の両方を行うことが可能です。このタイプのロボットは、スポット溶接や工作機械の操作などの用途に広く使用されています。
極座標ロボット
極座標ロボットまたは球体座標ロボットは、回転ジョイント、2つの回転ジョイント、およびリニアジョイントの組み合わせにより、球体の作業範囲内で動作します。極座標ロボットは、回転ジョイント、2つの回転ジョイント、およびリニアジョイントの組み合わせにより、球状のワークスペース内で動作します。球状のワークスペースにアクセスできるため、上記の円筒座標型ロボットアームと同様の役割を果たすことができますが、ワークスペース内を前後に移動する能力が高くなります。
スカラロボット
スカラ(SCARA)とは、Selective Compliance Assembly Robot Arm(またはSelective Compliance Articulated Robot Arm)の頭文字をとったものです。ロボット工学の文脈で「コンプライアンス」とは、動作における許容可能な柔軟性の度合いを意味し、スカラロボットは、他の軸では絶対的な剛性を保ちながら、1つまたは2つの動作方向ではある程度の柔軟性を許容するように設計されています。これは、特定の組み立て作業や部品配置作業において特に有用であり、選択的なコンプライアンスの利点は、非常に厳しい公差で実行される作業において、緊密にフィットする部品を結合したり破損したりすることなく互いにはめ込むことができます。