- 発行日 2025年9月2日
- 最終変更日 2025年9月2日
- 5 分
10個の簡単な自作ロボットプロジェクト
本記事では、国内で入手可能な部品を使い、家庭で安全に取り組める初心者向けロボットプロジェクトを10個ご紹介します。

はじめに – 家庭や教室で始めるロボット工作
ロボット工作は、家庭や教室で手軽に始められる科学教育の一環として注目されています。市販の工業用ロボットを扱う必要はなく、Arduinoやmicro:bit、Raspberry Piといった小型のマイコンボードを使えば、初心者でも簡単にロボットを自作できます。これらのプラットフォームは、国内でも広く普及しており、教材やサンプルコードも豊富に揃っているため、導入しやすいのが特長です。
ロボット工作を始めることで、プログラミングや電子回路、問題解決力といったSTEMスキルを自然に身につけることができます。また、小学生から高校生はもちろん、保護者や教師にとっても、安全で創造的な学習活動として取り組めます。
必要な道具は、100円ショップや国内の電子部品店で手軽にそろえることができ、作業スペースも机ひとつ分あれば十分です。初心者でも、産業用の工具や専門知識がなくても、実際に動く機能的なロボットを作ることができます。
本記事では、国内で入手可能な部品を使い、家庭で安全に取り組める初心者向けロボットプロジェクトを10個ご紹介します。
1. ライントレースロボット(トラックカー)
モーター制御やセンサの基本を学ぶのに最適で、初心者向けのロボットプログラミング入門として、多くの教育現場で活用されています。
- 対応プラットフォーム: Arduino、micro:bit
- 必要な部品: DCモーター2個、赤外線センサ、車輪、電池ボックス
- 習得スキル: センサ制御、PWM、モーター制御、if文による条件判断
- 難易度: ★★★☆☆
作り方
まず、軽量のシャーシ(国内の電子工作キットで簡単に入手可能)に、2つのモーターと車輪を取り付けます。シャーシは、安定性を保つために四角形や台形のフレームが望ましく、ネジ穴の位置が調整しやすいものを選ぶと便利です。前方には赤外線センサを設置し、床の黒線を正確に検出できるよう、センサの角度や高さを微調整します。
Arduinoやmicro:bitを使って、左右のモーターの速度を個別に制御し、センサが黒いラインを検知した際に進行方向を自動で修正するプログラムを作成します。国内向けの教材には、配線図やサンプルコードが丁寧に付属していることが多く、初心者でも段階的に学びながら安心して製作に取り組めます。
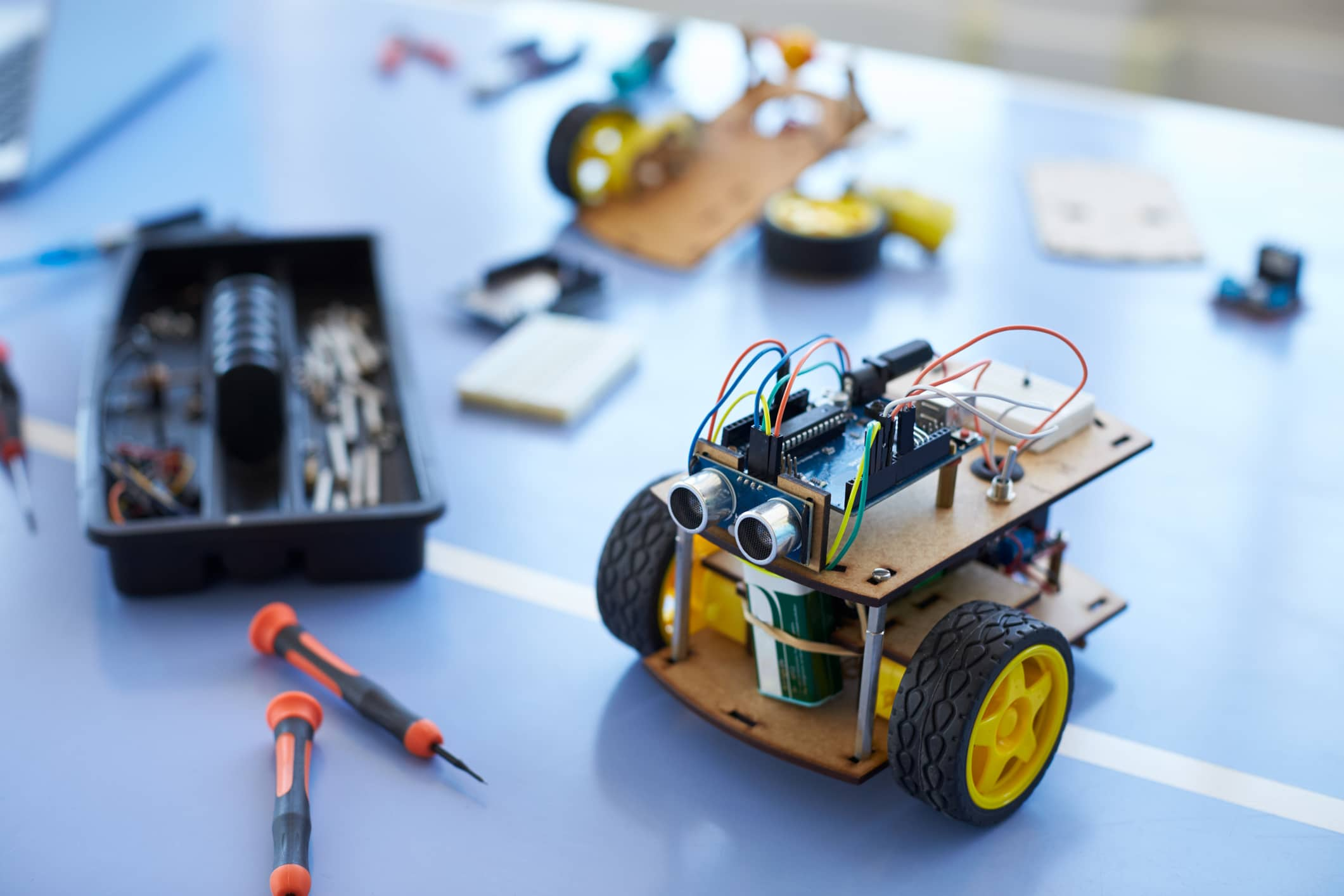
2. 障害物回避ロボット
超音波センサを使い、ロボットが障害物を自動で回避しながら移動できるように設計します。自動運転ロボットの基礎的な動作原理を学べる入門プロジェクトです。
- 対応プラットフォーム: Arduino、Raspberry Pi
- 必要な部品: 超音波距離センサ、DCモーター2個、シャーシ
- 習得スキル: 距離計測、条件分岐、簡易的な自律走行
- 難易度: ★★★☆☆
作り方
まず、シャーシにモーターと車輪を取り付け、配線が安定するようにしっかりと固定します。ロボット前方には超音波センサを設置し、左右の角度を微調整することで、広い範囲の障害物を検知できるようにします。
Arduinoを使ってセンサからの信号を読み取り、障害物までの距離を測定します。一定距離以内に物体を検知した場合には、停止や旋回だけでなく、速度を落とす処理や複数のセンサによる回避動作の細かな制御も可能です。Pythonでのロボット開発に挑戦する場合は、Raspberry Piを用いて、より高度なアルゴリズムやセンサ統合による自律走行の精度向上も目指せます。
3. LED歩行ロボット(シンプル二足歩行)
二足歩行の仕組みを手軽に学べる、初心者向けのロボット工作プロジェクトです。
- 対応プラットフォーム: micro:bit(MakeCode推奨)
- 必要な部品: サーボモーター2個、紙やストロー、LED
- 習得スキル: サーボ角度制御、ビジュアルプログラミング、簡易的なメカ設計
- 難易度: ★★☆☆☆
作り方
まず、紙やストローを使って軽量な脚部フレームを作り、安定性を高めるために適宜補強を加えます。接合部にはテープや軽量接着剤を使うと、強度が向上します。 2つのサーボモーターで左右の脚を交互に動かし、バランスを取りながら前進できるように調整します。足先には、滑りにくくするためにゴムやスポンジ素材を取り付けると効果的です。
micro:bitのMakeCodeを使ってタイマーによる歩行動作をプログラムし、歩行速度や足の可動範囲を細かく設定できます。さらにLEDを取り付けて、動作状態やステップのリズムを視覚的に確認できるようにすれば、歩行パターンや方向転換のバリエーションも試すことができます。
4. Bluetooth制御カー(スマートフォンリモート)
スマートフォンから無線操作できる小型車を作ることで、通信や遠隔制御の基本を学べるプロジェクトです。
- 対応プラットフォーム: Arduino
- 必要な部品: Bluetoothモジュール(HC-05)、DCモーター2個、L298Nモータードライバ
- 習得スキル: シリアル通信、スマホとのペアリング、モーター制御
- 難易度: ★★★☆☆
作り方
ArduinoにBluetoothモジュールとモータードライバを接続し、スマートフォンから前進・後退・左右旋回を操作できるようにします。配線は正確に行い、モーターの回転方向を確認しながら調整します。
スマートフォン側では、既存のBluetoothコントローラーアプリを使用するか、専用のアプリを自作して操作が可能です。さらに、速度調整、LEDの点灯制御、ホーン機能や追加センサの制御などを組み込めば、より高度なリモートカーへと発展させられます。また、障害物センサやGPSモジュールを組み合わせることで、半自律走行が可能なロボットカーとして拡張できます。将来的には、IoTとの連携による遠隔監視やデータ収集といった応用も視野に入ります。
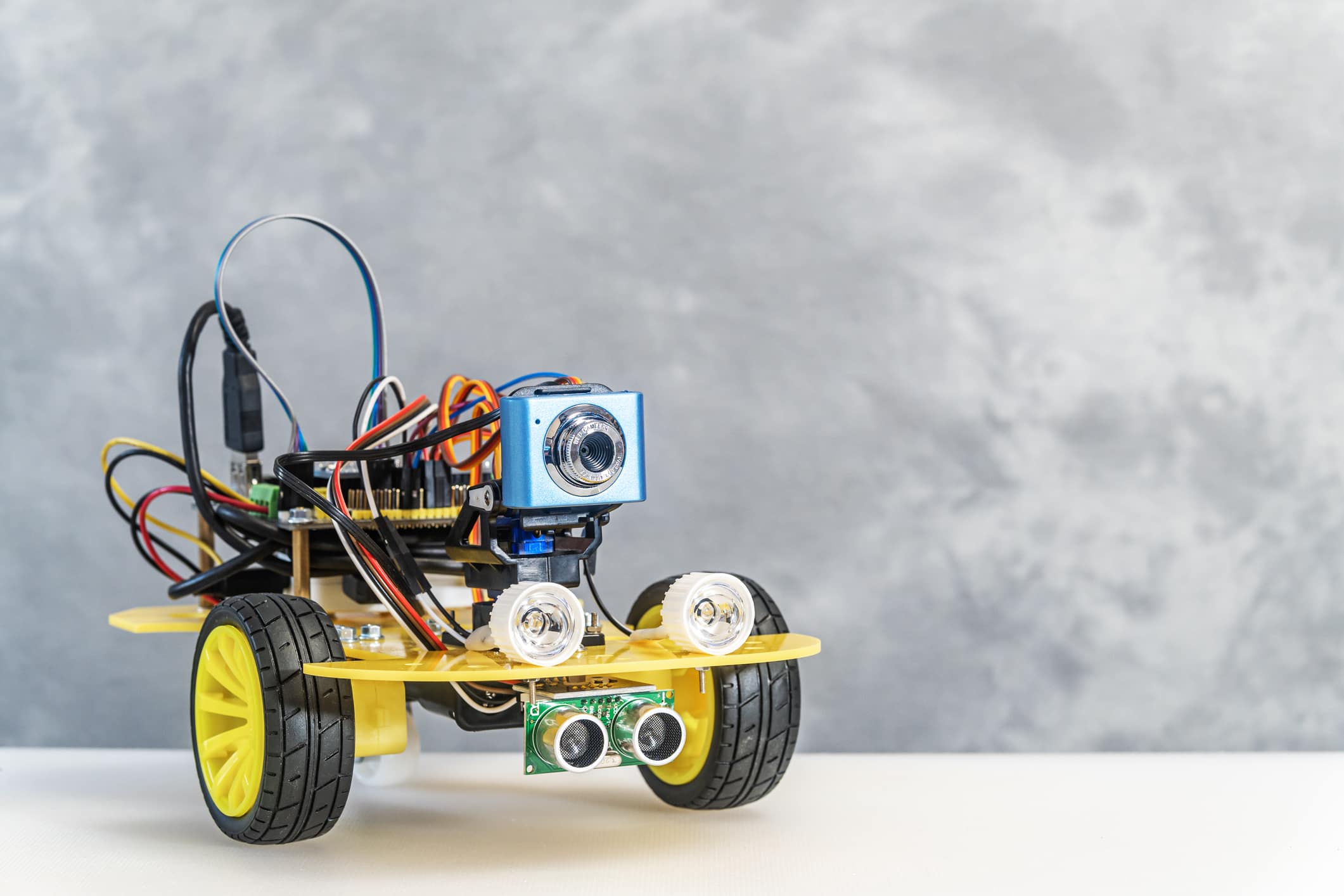
5. カメラ付き監視ロボット
カメラ映像を活用して遠隔監視を行うロボットを製作し、セキュリティや観察に関する技術を学べるプロジェクトです。
- 対応プラットフォーム: Raspberry Pi
- 必要な部品: Piカメラモジュール、モーター、シャーシ
- 習得スキル: 動画ストリーミング、Pythonの基礎、ネットワーク設定
- 難易度: ★★★★☆
作り方
まず、シャーシにモーターを取り付け、配線がしっかり固定されるように工夫します。続いて、Raspberry Piとカメラモジュールを搭載し、電源管理やケーブルの取り回しにも注意を払いましょう。安定したWi-Fi接続を確保するためには、ネットワーク設定も重要です。
また、長時間稼働を見据えて、バッテリー容量の見直しや冷却ファンの導入など、電源の持続性や発熱対策も検討すると良いでしょう。通信の安定性を高めたい場合は、外部アンテナの追加も効果的です。
完成したロボットは、スマートフォンやPCから映像をリアルタイムで確認しながら遠隔操作が可能です。さらに、映像の録画機能やモーターの速度調整、追加センサによる自律巡回機能を組み込めば、セキュリティ監視や定点観測に対応する高度な監視ロボットへと発展させることができます。
6. 光追従ロボット(フォトトロピック)
光の方向を追って移動するシンプルな自律走行ロボットで、光センサ制御の基礎を学ぶのに適した入門プロジェクトです。
- 対応プラットフォーム: Arduino
- 必要な部品: 光センサ2個、モーター2個
- 習得スキル: アナログセンサ入力、モーター制御
- 難易度: ★★★☆☆
作り方
左右に配置した光センサの明るさの差を検出し、その値に応じて左右のモーターの速度を微調整することで、ロボットがより明るい方向へ自然に移動するようプログラムします。単純な回転だけでなく、スムーズな追従動作を実現するには、センサの配置や角度、取り付け位置の調整が重要です。また、光源の位置が変わる環境や、複数の光源が存在する場面でも安定して動作させるには、センサの感度や応答速度のパラメータを適切に調整しましょう。
このロボットは、太陽光を追従する簡易ソーラーロボットの基礎にもなり、光を使って進路を決める自律走行の考え方を学ぶことができます。さらに、光を活用したエネルギー効率の向上や、環境変化への適応力を育てる教材としても有効です。
7. ジェスチャ制御ロボットアーム
手の動きによってロボットアームを操作できるシステムを作り、センサや無線通信の仕組みを学べます。
- 対応プラットフォーム: micro:bit
- 必要な部品: サーボモーター4個、micro:bit 2台、無線通信機能
- 習得スキル: 加速度センサ、無線通信、サーボ制御
- 難易度: ★★★★☆
作り方
1台のmicro:bitを手首に装着し、加速度センサを使って手の動きを検出します。センサの感度や検出方向を調整し、複数のジェスチャを正確に認識できるように設定します。たとえば、手の傾きや振りの速さに応じて、それぞれ異なる動作を割り当てることで、より直感的な制御が可能になります。
検出したジェスチャの情報は無線通信を通じて、もう1台のmicro:bitへ送信されます。受信側では、複数のサーボモーターを同時に制御するプログラムを組み、ロボットアームの関節をより自然かつ滑らかに動かせるようにします。さらに、動作パターンを記録・カスタマイズし、操作モードを切り替えられるようにすることで、より実践的な応用が可能になります。
8. 音声反応ロボット
音に反応して動く簡単なインタラクティブロボットで、センサを活用した反応制御の基礎を学べます。
- 対応プラットフォーム: Arduino、micro:bit
- 必要な部品: サウンドセンサモジュール、LED、モーター
- 習得スキル: 音声認識、インタラクティブデザイン
- 難易度: ★★☆☆☆
作り方
サウンドセンサを使って、手を叩いた音や声を検知し、それに応じてLEDを点灯させたりモーターを動かしたりするインタラクティブな反応を実現します。さらに、音の大きさや方向に応じて反応内容を変える機能を追加すれば、よりリアルな反応が可能になります。LEDやスピーカーを複数組み合わせて、視覚・聴覚の両面からフィードバックを強化するのも効果的です。
プログラムを工夫することで、拍手の回数やリズム応じた異なる動作を実行させるなど、より高度なインタラクションにも発展させられます。加えて、簡易的な音声コマンドを認識する機能を組み込めば、音声による操作も可能になります。さらに、センサ感度の調整やノイズ対策を行えば、騒がしい環境下でも安定した動作が期待できます。
9. 顔認識ロボット
顔を検出し、その認識結果に応じて動作するロボットを製作することで、画像処理やAIの基本的な技術を学べます。
- 対応プラットフォーム: Raspberry Pi(OpenCV使用)
- 必要な部品: カメラ、モーター、シャーシ
- 習得スキル: AI基礎、画像処理、Pythonプログラミング
- 難易度: ★★★★☆
作り方
Piカメラを使って顔を検出し、特定の顔を認識した際にロボットが反応するプログラムを作成します。顔認識の精度を向上させるために、OpenCVライブラリを活用し、複数の検出モデルを組み合わせることで、照明や角度の違いに対応できるように調整します。Pythonによる制御を通じて、顔の動きにあわせて滑らかに追従させたり、一定の距離を保ちながら回避行動を取らせる機能も実装可能です。さらに、表情の違いに反応する演出や、顔認識データの記録機能を追加することで、複数の顔を学習して個別に識別する高度な動作へと拡張することもできます。
10. スマートゴミ箱(自動開閉蓋)
家庭で役立つ便利グッズとして、自動で蓋が開閉するゴミ箱を作成するプロジェクトです。センサを活用した小規模な自動化技術を学ぶ入門として適しています。
- 対応プラットフォーム: Arduino、ROCK SBC
- 必要な部品: 超音波センサ、サーボモーター、蓋付き容器
- 習得スキル: 近接センサの活用、簡易機構設計、自動化のプロトタイピング
- 難易度: ★★★☆☆
作り方
ゴミ箱本体に超音波センサを取り付け、手が近づいたことを検知すると、サーボモーターが作動して蓋が自動で開く仕組みを構築します。さらに、一定時間が経過したら自動で蓋が閉じるタイマー機能を追加することで、衛生面の改善や省エネルギー化が図れます。
LEDインジケータを加えることで、センサの反応状況を視覚的に確認できるようになります。また、赤外線センサや静電容量センサを併用して感知精度を向上させることも可能です。
このように、身近な課題をテーマにした自動化プロジェクトは人気が高く、日常生活で実際に役立つスマートデバイスの制作体験として、多くの学びを得ることができます。
まとめ – 10個のプロジェクトを超えて
これらのロボット工作を通じて、センサやモーター制御、そして簡単なAI技術に至るまで、幅広い知識と技術を身につけることができます。さらに学びを深めたい場合は、追加のセンサやモジュールを取り付けたり、IoTと連携させたりして、オリジナルのロボットに発展させることも可能です。また、国内のメイカーズクラブや学校のロボット教室に参加すれば、同じ興味を持つ仲間と交流しながら、より実践的な学びを深めることができます。
安全に作業を進めるためには、電池の取り扱いや配線の固定などに十分注意しましょう。適切なメンテナンスを行うことで、長く楽しくロボット制作を続けられます。ロボット工作は、未来のエンジニアや研究者を育てる第一歩であり、日本の技術革新を支える貴重な学びの場でもあります。


