- 発行日 2025年9月28日
- 最終変更日 2025年9月28日
- 5 分
10個のラズベリーパイロボットプロジェクト
10個のラズベリーパイロボットプロジェクトを紹介。初心者から中級者まで、学生・保護者・ホビイスト向けに学べる工作とプログラミング入門アイデアです。

はじめに:ラズベリーパイとロボット工作の世界へ
ラズベリーパイは、手のひらサイズの小型コンピュータでありながら、高い拡張性を備えています。そのため、モーターやセンサ、カメラを制御する「ロボットの頭脳」として幅広く利用されています。国内でも教育現場や家庭でのSTEM学習に活用され、ロボット工作の定番アイテムとして注目を集めています。
ロボット制作を通じて得られる学びは多岐にわたります。プログラミング、電子回路、機械設計、AIの基礎といった幅広い分野に触れられるため、小中高生はもちろん、さらには趣味でロボットに挑戦したい大人にも人気があります。特に日本では、放課後のメイカークラブや地域のワークショップを中心に、自律走行ロボットや音声認識ロボットなどのプロジェクトが盛んに行われています。
この記事では、初心者から中級者まで取り組める10個のラズベリーパイロボットプロジェクトをご紹介します。日本で入手可能な部品を用い、家庭や教室で安全に製作できる内容を中心に解説します。
1. ラインフォローロボットカー
モーター制御と赤外線センサの使い方を学べる、ロボット工作の基本プロジェクトです。日本のロボット競技会でもよく登場する定番テーマで、入門にも最適です。
- 必要な部品: 2輪シャーシキット、モータードライバHAT、ラズベリーパイ赤外線センサ、電池ボックス
- 習得スキル: ラズベリーパイモータ制御、センサ入力、Pythonプログラミング
- 難易度: ★★☆☆☆
作り方
- シャーシ組み立て 2輪シャーシキットを準備し、左右にモーターを取り付けます。車輪がスムーズに回転するように位置を調整してください。
- センサ設置 赤外線センサをシャーシ前方に取り付け、黒いラインを正確に検知できるよう高さと角度を設定します。
- 配線 ラズベリーパイとモータードライバHATを接続し、モーターと正しく配線します。誤配線を防ぐため、接続後に必ず確認しましょう。
- プログラム作成 Pythonでセンサ入力を読み取り、左右のモーターを制御する条件分岐を実装します。
- テストと調整 実際に走行させ、センサ感度やモーター速度を微調整します。安定してラインをたどれるまで繰り返し調整しましょう。
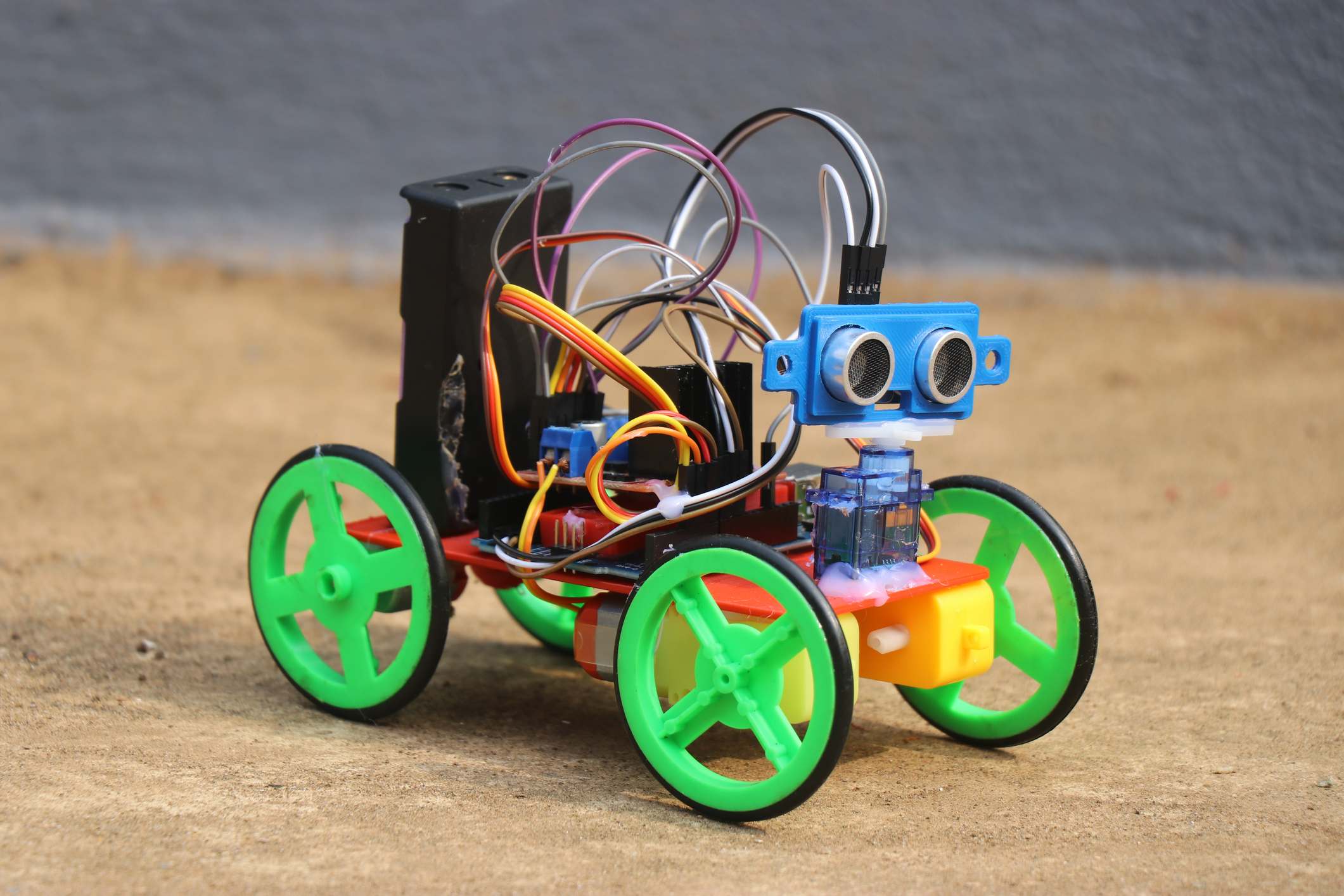
2. 障害物回避ロボット
超音波センサを使って障害物を検知し、自動で回避する自律走行ロボットです。基本的な「見る・判断する・動く」の仕組みを体験できるため、入門学習に最適です。
- 必要な部品: HC-SR04超音波センサ、モーター2個、シャーシ、モータードライバボード
- 習得スキル: 距離計測、条件分岐、自律走行プログラミング
- 難易度: ★★☆☆☆
作り方
- センサ取り付け ロボット前方にHC-SR04センサを設置し、高さと角度を調整して障害物を正しく検出できるようにします。
- 配線テスト センサをラズベリーパイに接続し、距離データが取得できるかPythonで簡単なテストコードを実行します。
- プログラム作成 Pythonで距離測定プログラムを作成し、一定距離以内に物体がある場合は「危険」と判断する条件分岐を追加します。
- モーター制御 モータードライバと接続し、障害物が近いときには停止または回避行動(旋回など)を行う制御を組み込みます。
- 走行テストと調整 実際に走らせながら、停止距離や旋回角度を調整します。環境に応じた最適な値を見つけるまで繰り返しましょう。
3. 音声認識ロボットカー
ラズベリーパイマイク(USBマイク)を使い、音声コマンドで動かせるインタラクティブなロボットカーです。音声認識とロボット制御を組み合わせることで、AI応用の基礎を学べます。
- 必要な部品: USBマイク、モータードライバキット、2WDシャーシ
- 習得スキル: 音声認識、Pythonによるロボット制御、AI応用
- 難易度: ★★★☆☆
作り方
- 環境設定 Google Speech APIなどの音声認識ライブラリを導入し、ラズベリーパイ上で動作するように環境設定を整えます。
- マイク接続と調整 USBマイクを接続し、録音した音声が正しくテキストに変換されるか確認します。マイクの位置を工夫することで認識精度が向上します。
- プログラム作成 Pythonで音声データをリアルタイムにテキストへ変換するプログラムを作り、特定の単語を検出したときに処理を実行する条件分岐を追加します。
- モーター制御 モータードライバと接続し、「前進」「後退」「右」「左」といった音声コマンドに応じてモーターの動きを制御できるようにします。
- テストと改善 実際に音声でロボットを走行させ、誤認識や反応の遅延があれば調整します。必要に応じて辞書を拡張し、精度を高めましょう。
4. カメラ付き物体検出ロボット
ラズベリーパイOpenCVを使い、カメラ映像から物体を検出して動作するロボットです。コンピュータビジョンの基礎を体験できるプロジェクトで、画像処理の入門にも適しています。
- 必要な部品: Piカメラモジュール、モーター付きシャーシ、電源ユニット
- 習得スキル: 画像処理、カメラ制御、Pythonによるロボット制御
- 難易度: ★★★☆☆
作り方
- カメラの準備 Piカメラをラズベリーパイに接続し、シャーシにしっかり固定します。振動で外れないように注意しましょう。
- 映像取得の確認 OpenCVライブラリをインストールし、Pythonでカメラ映像を取得できるかテストします。必要に応じて解像度を調整してください。
- 物体検出の実装 色や形状を基準に対象物を検出できるアルゴリズムを組み込みます。まずは単純な色識別から始めると理解しやすいです。
- 動作との連動 物体を検出したときに、モーター制御と連動して「前進」「停止」といった動作を行うプログラムを作成します。
- テストと調整 実際に走行させ、検出感度や反応速度を調整します。環境光やカメラの角度による誤検出を確認し、最適な設定を見つけましょう。
5. サーボモーターを使った簡単ロボットアーム
サーボモーターを使って動かすロボットアームの基本プロジェクトです。物をつかむ、持ち上げるといった動作を通して、サーボ制御や機械構造の基礎を学ぶことができます。日本のロボット競技会でもよく見られる形式です。
- 必要な部品: SG90サーボモーター(3〜4個)、ロボットアームキット、ブレッドボード
- 習得スキル: サーボ制御、PWMの基礎、機械構造の理解
- 難易度: ★★☆☆☆
作り方
- アームの組み立て ロボットアームキットを開封し、ベース部分から組み立てを始めます。付属パーツを確認しながら順番に組み立てましょう。
- サーボの取り付け 各関節にSG90サーボモーターを取り付け、ネジでしっかり固定します。緩みがあると正確に動作しません。
- 配線 サーボをブレッドボード経由でラズベリーパイに接続し、5V電源とGNDを共通にします。複数のサーボを使うので、電源容量にも注意してください。
- PWM制御のテスト PythonでPWM信号を生成し、サーボの角度を制御するコードを作成します。まずは1つのサーボでテストし、動作を確認しましょう。
- 動作プログラミング 物をつかむ、持ち上げる、回転させるといった動作を順にプログラムします。重量や可動範囲を考慮して調整してください。
- シーケンス制御 複数の動作を動作を組み合わせてシーケンス制御を行い、連続動作を実現します。例えば「つかむ→持ち上げる→移動→離す」といった一連の流れを再現できます。ロボットアームは、メカ設計・電子制御・プログラミングを一度に学べる優れた教材です。教育現場や趣味の学習にもぴったりで、発展的にはAIやカメラと組み合わせた自動化プロジェクトにもつなげられます。
6. 顔追跡ロボット
ラズベリーパイOpenCVで顔を認識し、サーボモーターを動かして追従させるロボットです。AI技術とロボット制御を組み合わせた入門に最適で、コンピュータビジョンの基礎を体験できます。
- 必要な部品: Piカメラモジュール、サーボモーター2個、パン・チルトキット
- 習得スキル: 顔検出、サーボ追跡制御、AI基礎
- 難易度: ★★★★☆
作り方
- カメラのセットアップ ラズベリーパイにPiカメラを接続し、パン・チルトキットに固定します。位置がずれないようにしっかりと取り付けてください。
- 顔検出の準備 OpenCVライブラリをインストールし、サンプルプログラムで顔検出ができるか確認します。必要に応じて解像度や照明を調整すると精度が上がります。
- プログラム作成 Pythonで顔検出プログラムを作成し、検出した顔の座標をリアルタイムで取得します。更新頻度を上げると追跡がより滑らかになります。
- サーボ制御 サーボモーターをPWMで制御し、の動作を連動させます。顔の位置に応じてサーボを動かすアルゴリズムを組み込みましょう。
- 調整とテスト 実際に動作させ、反応速度やサーボ角度を微調整します。小さな動きに過剰反応しないよう、閾値を設定すると安定します。
- 発展的な応用 顔が複数ある場合に優先順位をつけて追跡したり、表情認識を追加してリアクションを変えるなど、より高度な機能へ発展させることも可能です。
7. ジェスチャ制御ロボット(加速度センサ搭載)
ラズベリーパイ加速度センサを利用し、手の動きで操作できるロボットです。加速度センサを使って直感的に動かせるため、学習にも遊びにも活用できるプロジェクトです。
- 必要な部品: 加速度センサ、Bluetoothモジュール、2WDロボットキット
- 習得スキル: 加速度データの解析、無線通信、ジェスチャマッピング
- 難易度: ★★★☆☆
作り方
- センサ接続 加速度センサをラズベリーパイに接続し、Pythonでセンサ値を取得するプログラムを用意します。配線が安定しているか必ず確認しましょう。
- データの取得と理解 X軸・Y軸・Z軸ごとの加速度を読み取り、手の傾きや振りを数値として確認します。
- 動作への割り当て 数値を基にしきい値を設定し、「前進」「後退」「右」「左」などの動作に対応させます。
- モーター制御 モータードライバを接続し、動作に応じて車輪を制御します。これにより、手の動きに合わせてロボットが移動するようになります。
- 調整とテスト 実際に走行させ、傾き角度や振りの強さに対する反応を確認します。感度が高すぎると誤動作するため、必要に応じて数値を調整してください。

8. 迷路ロボット
複数のセンサを組み合わせ、迷路を自律的に探索してゴールを目指す自律走行ロボットです。アルゴリズム設計を体験できるため、学習教材としても最適です。
- 必要な部品: ラインセンサ、HC-SR04超音波センサ、4WDシャーシ、モータードライバHAT
- 習得スキル: 経路探索アルゴリズム、センサ統合、ロボットナビゲーション
- 難易度: ★★★★☆
作り方
- センサの設置 ラインセンサとHC-SR04超音波センサをロボットに取り付けます。前方や左右に設置して、壁や通路を検知できるように調整しましょう。
- センサデータの確認 各センサをラズベリーパイに接続し、Pythonでデータを読み取れるかテストします。正しく値が取得できることを確認してください。
- アルゴリズムの実装 Pythonでアルゴリズムを作成し、壁を検知したときに進行方向を変更する条件分岐を組み込みます。
- 迷路探索の方法 右手法や左手法といったシンプルな探索アルゴリズムを導入し、ゴールまでのルートを見つけられるようにします。
- 走行テストと調整 実際に迷路で走行させ、曲がり角や袋小路での挙動を確認します。誤作動があればセンサ感度や条件を調整してください。
9. IoT連携監視ロボット
Wi-Fiとカメラを組み合わせて、遠隔から映像を確認できるセキュリティ向けロボットです。実用性が高く、学習テーマとしても人気があります。
- 必要な部品: Wi-Fiモジュール、Piカメラ、PIRモーションセンサ、移動シャーシ
- 習得スキル: IoT通信、動画ストリーミング、動体検知
- 難易度: ★★★★☆
作り方
- カメラとネットワークの設定 Piカメラをラズベリーパイに接続し、Wi-Fiモジュールで安定したネットワーク接続を確保します。映像が取得できるか確認してください。
- 映像ストリーミング Pythonでストリーミング用のプログラムを作成し、PCやスマートフォンから映像を確認できるようにします。解像度は利用環境に合わせて調整します。
- 動体検知の追加 PIRモーションセンサを接続し、動作を検知できるかテストします。センサの検知範囲や感度を設置環境に合わせて調整しましょう。
- アラート機能の実装 動きを感知したときにアラートを出す機能をプログラムに追加します。メール送信やブザー音、LED点灯など、通知方法を工夫できます。
- 走行テストと調整 実際にロボットを動かしてテストし、映像配信と検知機能が正しく連動しているか確認します。誤検知が多い場合は感度やしきい値を調整してください。
10. ヒューマノイドロボット
複数のサーボモーターを協調させ、あらかじめプログラムした動作を実行するロボットです。歩行や簡単なジェスチャを再現でき、日本のロボット研究に関心を持つきっかけとしても適しています。
- 必要な部品: ヒューマノイドロボットキット、複数のサーボモーター、Python開発環境
- 習得スキル: 複数サーボの協調制御、動作シーケンス設計、ヒューマノイド基礎
- 難易度: ★★★★☆
作り方
- 組み立て ヒューマノイドロボットキットを開封し、部品を確認したらベースフレームから順に組み立てます。安定性を確保するため、ネジや固定部はしっかり締めましょう。
- サーボの取り付け 関節部分にサーボモーターを設置し、角度を正確に合わせて固定します。取り付け精度が動作の安定性に直結します。
- 配線と電源 サーボをラズベリーパイに接続し、外部電源から安定した電力を供給します。電流不足を避けるため、サーボ数に応じた電源設計が必要です。
- 基本動作のプログラミング Pythonでサーボ制御プログラムを作成し、各関節の動きをテストします。まずは「手を振る」「前屈する」などシンプルな動作から始めると良いでしょう。
- 動作シーケンスの設計 歩行や連続動作をシーケンスとしてプログラムに組み込みます。複数の関節を協調させることで、自然な動きを実現できます。
- 調整と安定化 実際に動作させ、重心のバランスや動作速度を調整します。安定性を高めるために床材や姿勢制御アルゴリズムの工夫も有効です。
まとめ:次のステップへ
これらのラズベリーパイロボットプロジェクトを通じて、モーター制御からAI応用まで、幅広い技術を段階的に学ぶことができます。次のステップとしては、AIロボット、群ロボット、自動運転アルゴリズムなど、より高度な分野に挑戦することも可能です。
日本ではロボットコンテストやSTEM教育イベントが盛んに行われており、学んだスキルを実際に試す場が豊富にあります。また、安全に取り組むためには、外部電源の扱い方や配線整理を徹底し、トラブルを未然に防ぐことが大切です。 さらに、ロボットクラブや学校のメイカー活動に参加すれば、仲間と協力しながら知識を深めることができます。こうした実践的な活動を通じて、学びを楽しみながら次のステージへと進むことができるでしょう。


